




Educar um bebé é uma tarefa inicialmente caótica que pode parecer, a certa altura, quase impossível. Tornar uma criança independente em relação à sua capacidade motora diz respeito a um processo gradual e até natural. Normalmente são as próprias crianças que, ao imitar o que os adultos fazem, começam a andar e a agarrar objetos por si mesmas. Até esse momento, as quedas e o choro fazem parte do quotidiano. E se este método fosse aplicado aos robôs?
É o que um grupo de psicólogos e de cientistas tecnológicos da Universidade de Washington quer fazer. Ou seja, para ensinar a um aparelho robótico uma nova tarefa, seja ela qual for, o método tradicional é a aplicação de uma codificação no dispositivo para este se movimentar de uma maneira específica – e para locais específicos. De seguida, quando o robô o faz pela primeira vez, o objetivo é que ele memorize o que fez para poder repetir o processo quando for necessário. Por isso, e ao contrário dos bebés que basicamente repetem o que os adultos fazem, os robôs são ensinados em laboratório.
Agora, os especialistas no desenvolvimento das crianças e os cientistas juntaram-se numa investigação que pretende inverter este processo, tornando o método de aprendizagem dos robôs semelhante ao dos bebés. No fundo, o que estes investigadores fizeram foi ajustar os algoritmos de aprendizagem do robô para que este deixe de seguir os movimentos previamente programados. Assim, a máquina procura saber como funcionam diferentes estratégias quando colocadas perante uma nova tarefa, construindo-se desta maneira um modelo baseado na probabilidade da realidade em si mesma.
Um dos autores do trabalho e professor de ciência computadorizada, Rajesh Rao, explica que “pode-se olhar para isto como um primeiro passo para criar robôs que podem aprender com humanos, da mesma maneira que as crianças aprendem com os adultos (…) Se queres que as pessoas -que não sabem nada sobre programação de computadores -sejam capazes de ensinar um robô, a maneira de o fazer é através da demonstração, mostrando-lhe como lavar a loiça, dobrar a roupa ou realizar as tarefas domésticas. Mas para atingir este objetivo, é preciso que o robô compreenda estas ações e as faça por si mesmo”.
Os investigadores utilizaram assim exemplos de crianças com 18 meses de idade para desenvolver este projeto. Na prática foi utilizado um exemplo em que uma criança assiste um adulto a tentar separar um brinquedo em forma de barra. Mas este não o consegue porque o objeto foi preso nas extremidades fazendo com que as mãos escorreguem. O bebé, observando tudo, tenta ir por caminhos diferentes para alcançar o objetivo, utilizando os pequenos dedos para tentar puxar as extremidades presas, imitando o que o adulto tentou fazer em primeiro lugar.
Ora, foi este modelo de aprendizagem que a equipa utilizou para tentar criar os tais algoritmos que permitem o robô explorar diferentes caminhos com diferentes resultados. Depois é utilizado o modelo probabilístico para perceber o que o humano deseja e para se completar a respetiva tarefa.
Para isto os cientistas e psicólogos colocaram este modelo em prática em dois cenários diferentes. O primeiro consistiu em tentar ensinar o robô a seguir o olhar humano; e o segundo tentando-se fazer com que o aparelho aprenda a imitar as ações humanas, movimentando brinquedos da esquerda para a direta em cima de uma mesa plana.
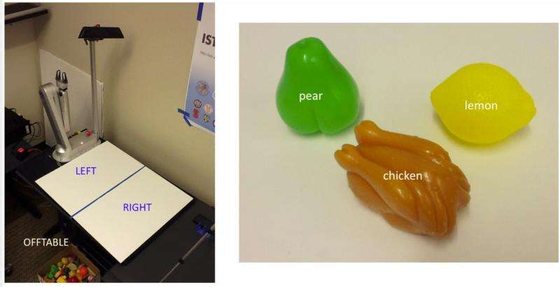
A equipa de investigadores tentou fazer com o que o robô movimentasse objetos da esquerda para a direita numa mesa, imitando as ações humanas.










